Modeling frictional non-planar contacts for compliant gripper jaws
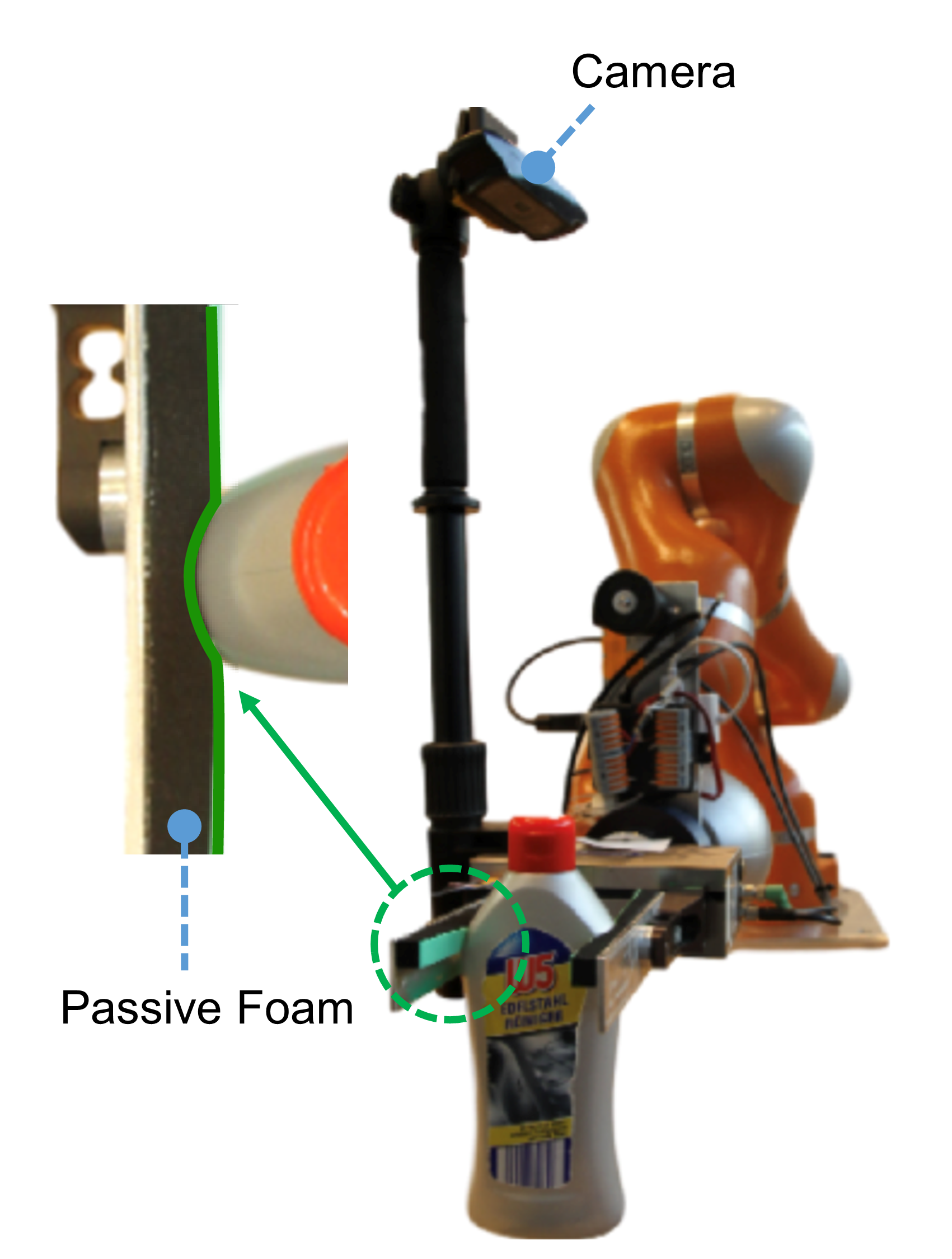
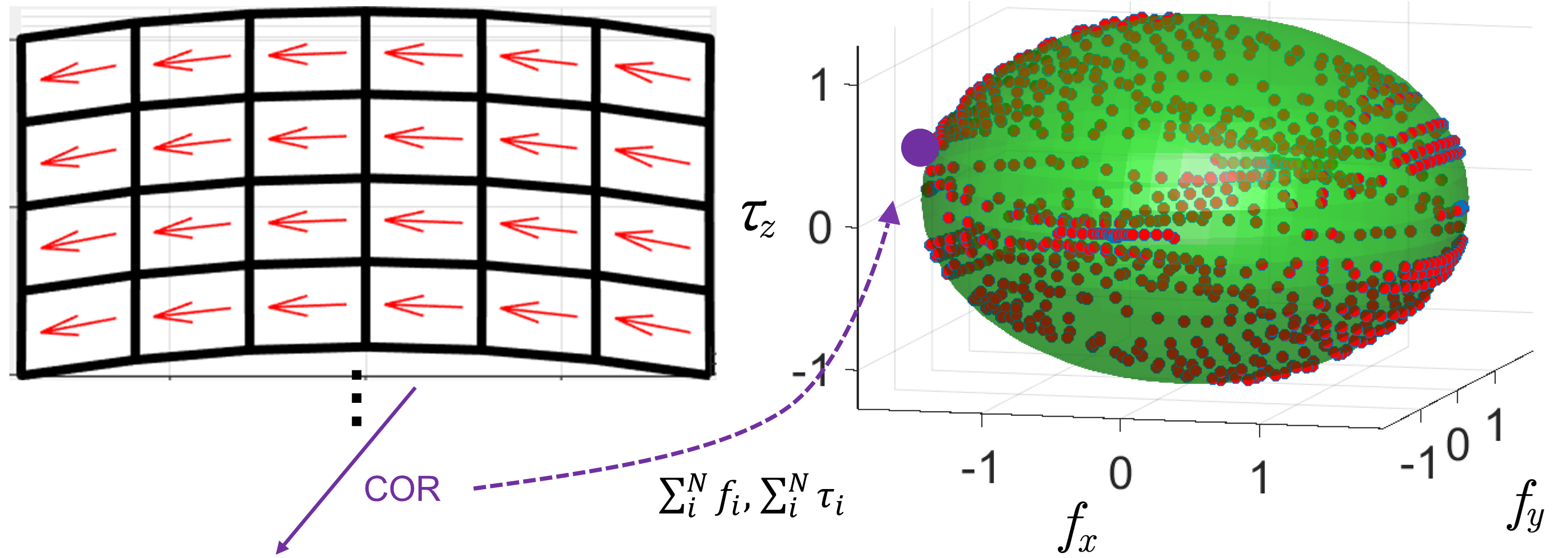
When an object is grasped with compliant gripper jaws, the contact area might be non-planar.
This work presents a friction model for such non-planar area contacts by using a limit surface. [Paper (ICRA 2017)]
[Spotlight Talk]
[Poster]